Add README and documentation to VirtualCamera
Add some inline documentation and a README file to document the
internals of VirtualCamera.
Test: N/A
Bug: N/A
Flag: DOCS_ONLY
Change-Id: I77670ab06a2fb65d16504ffe5d82d6c652948e29
diff --git a/services/camera/virtualcamera/README.md b/services/camera/virtualcamera/README.md
new file mode 100644
index 0000000..04b4811
--- /dev/null
+++ b/services/camera/virtualcamera/README.md
@@ -0,0 +1,164 @@
+# Virtual Camera
+
+The virtual camera feature allows 3rd party application to expose a remote or
+virtual camera to the standard Android camera frameworks (Camera2/CameraX, NDK,
+camera1).
+
+The stack is composed into 4 different parts:
+
+1. The **Virtual Camera Service** (this directory), implementing the Camera HAL
+ and acts as an interface between the Android Camera Server and the *Virtual
+ Camera Owner* (via the VirtualDeviceManager APIs).
+
+2. The **VirtualDeviceManager** running in the system process and handling the
+ communication between the Virtual Camera service and the Virtual Camera
+ owner
+
+3. The **Virtual Camera Owner**, the client application declaring the Virtual
+ Camera and handling the production of image data. We will also refer to this
+ part as the **producer**
+
+4. The **Consumer Application**, the client application consuming camera data,
+ which can be any application using the camera APIs
+
+This document describes the functionalities of the *Virtual Camera Service*
+
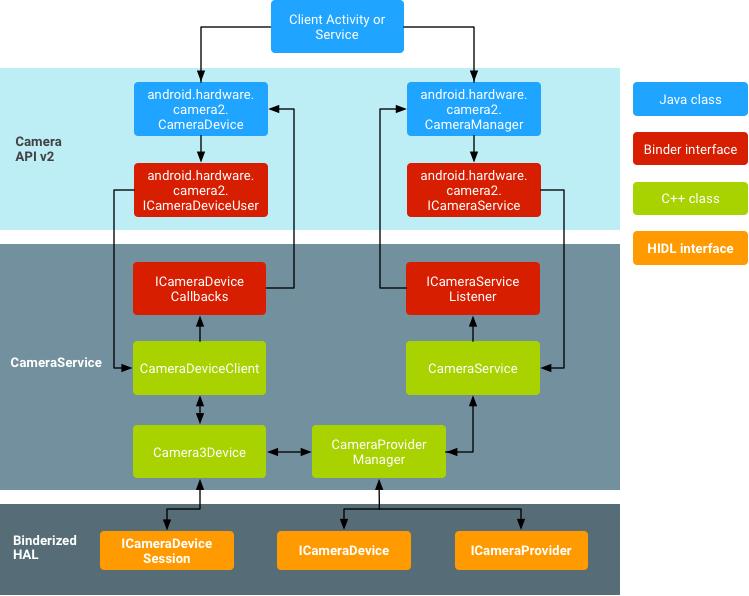
+## Before reading
+
+The service implements the Camera HAL. It's best to have a bit of an
+understanding of how it works by reading the
+[HAL documentation first](https://source.android.com/docs/core/camera)
+
+
+
+The HAL implementations are declared in: -
+[VirtualCameraDevice](./VirtualCameraDevice.h) -
+[VirtualCameraProvider](./VirtualCameraProvider.h) -
+[VirtualCameraSession](./VirtualCameraSession.h)
+
+## Current supported features
+
+Virtual Cameras report `EXTERNAL`
+[hardware level](https://developer.android.com/reference/android/hardware/camera2/CameraCharacteristics#INFO_SUPPORTED_HARDWARE_LEVEL)
+but some
+[functionalities of `EXTERNAL`](https://developer.android.com/reference/android/hardware/camera2/CameraMetadata#INFO_SUPPORTED_HARDWARE_LEVEL_EXTERNAL)
+hardware level are not fully supported.
+
+Here is a list of supported features - Single input multiple output stream and
+capture:
+
+- Support for YUV and JPEG
+
+Notable missing features:
+
+- Support for auto 3A (AWB, AE, AF): virtual camera will announce convergence
+ of 3A algorithm even though it can't receive any information about this from
+ the owner.
+
+- No flash/torch support
+
+## Overview
+
+Graphic data are exchanged using the Surface infrastructure. Like any other
+Camera HAL, the Surfaces to write data into are received from the client.
+Virtual Camera exposes a **different** Surface onto which the owner can write
+data. In the middle, we use an EGL Texture which adapts (if needed) the producer
+data to the required consumer format (scaling only for now, but we might also
+add support for rotation and cropping in the future).
+
+When the client application requires multiple resolutions, the closest one among
+supported resolutions is used for the input data and the image data is down
+scaled for the lower resolutions.
+
+Depending on the type of output, the rendering pipelines change. Here is an
+overview of the YUV and JPEG pipelines.
+
+**YUV Rendering:**
+
+```
+Virtual Device Owner Surface[1] (Producer) --{binds to}--> EGL
+Texture[1] --{renders into}--> Client Surface[1-n] (Consumer)
+```
+
+**JPEG Rendering:**
+
+```
+Virtual Device Owner Surface[1] (Producer) --{binds to}--> EGL
+Texture[1] --{compress data into}--> temporary buffer --{renders into}-->
+Client Surface[1-n] (Consumer)
+```
+
+## Life of a capture request
+
+> Before reading the following, you must understand the concepts of
+> [CaptureRequest](https://developer.android.com/reference/android/hardware/camera2/CaptureRequest)
+> and
+> [OutputConfiguration](https://developer.android.com/reference/android/hardware/camera2/OutputConfiguration).
+
+1. The consumer creates a session with one or more `Surfaces`
+
+2. The VirtualCamera owner will receive a call to
+ `VirtualCameraCallback#onStreamConfigured` with a reference to another
+ `Suface` where it can write into.
+
+3. The consumer will then start sending `CaptureRequests`. The owner will
+ receive a call to `VirtualCameraCallback#onProcessCaptureRequest`, at which
+ points it should write the required data into the surface it previously
+ received. At the same time, a new task will be enqueued in the render thread
+
+4. The [VirtualCameraRenderThread](./VirtualCameraRenderThread.cc) will consume
+ the enqueued tasks as they come. It will wait for the producer to write into
+ the input Surface (using `Surface::waitForNextFrame`).
+
+ > **Note:** Since the Surface API allows us to wait for the next frame,
+ > there is no need for the producer to notify when the frame is ready by
+ > calling a `processCaptureResult()` equivalent.
+
+5. The EGL Texture is updated with the content of the Surface.
+
+6. The EGL Texture renders into the output Surfaces.
+
+7. The Camera client is notified of the "shutter" event and the `CaptureResult`
+ is sent to the consumer.
+
+## EGL Rendering
+
+### The render thread
+
+The [VirtualCameraRenderThread](./VirtualCameraRenderThread.h) module takes care
+of rendering the input from the owner to the output via the EGL Texture. The
+rendering is done either to a JPEG buffer, which is the BLOB rendering for
+creating a JPEG or to a YUV buffer used mainly for preview Surfaces or video.
+Two EGLPrograms (shaders) defined in [EglProgram](./util/EglProgram.cc) handle
+the rendering of the data.
+
+### Initialization
+
+[EGlDisplayContext](./util/EglDisplayContext.h) initializes the whole EGL
+environment (Display, Surface, Context, and Config).
+
+The EGL Rendering is backed by a
+[ANativeWindow](https://developer.android.com/ndk/reference/group/a-native-window)
+which is just the native counterpart of the
+[Surface](https://developer.android.com/reference/android/view/Surface), which
+itself is the producer side of buffer queue, the consumer being either the
+display (Camera preview) or some encoder (to save the data or send it across the
+network).
+
+### More about OpenGL
+
+To better understand how the EGL rendering works the following resources can be
+used:
+
+Introduction to OpenGL: https://learnopengl.com/
+
+The official documentation of EGL API can be queried at:
+https://www.khronos.org/registry/egl/sdk/docs/man/xhtml/
+
+And using Google search with the following query:
+
+```
+[function name] site:https://registry.khronos.org/EGL/sdk/docs/man/html/
+
+// example: eglSwapBuffers site:https://registry.khronos.org/EGL/sdk/docs/man/html/
+```
diff --git a/services/camera/virtualcamera/VirtualCameraRenderThread.cc b/services/camera/virtualcamera/VirtualCameraRenderThread.cc
index 08b8e17..3557791 100644
--- a/services/camera/virtualcamera/VirtualCameraRenderThread.cc
+++ b/services/camera/virtualcamera/VirtualCameraRenderThread.cc
@@ -679,7 +679,7 @@
return {};
}
- // TODO(b/324383963) Add support for letterboxing if the thumbnail size
+ // TODO(b/324383963) Add support for letterboxing if the thumbnail sizese
// doesn't correspond
// to input texture aspect ratio.
if (!renderIntoEglFramebuffer(*framebuffer, /*fence=*/nullptr,
@@ -753,6 +753,7 @@
PlanesLockGuard planesLock(hwBuffer, AHARDWAREBUFFER_USAGE_CPU_READ_RARELY,
fence);
if (planesLock.getStatus() != OK) {
+ ALOGE("Failed to lock hwBuffer planes");
return cameraStatus(Status::INTERNAL_ERROR);
}
@@ -760,23 +761,35 @@
createExif(Resolution(stream->width, stream->height), resultMetadata,
createThumbnail(requestSettings.thumbnailResolution,
requestSettings.thumbnailJpegQuality));
+
+ unsigned long outBufferSize = stream->bufferSize - sizeof(CameraBlob);
+ void* outBuffer = (*planesLock).planes[0].data;
std::optional<size_t> compressedSize = compressJpeg(
stream->width, stream->height, requestSettings.jpegQuality,
- framebuffer->getHardwareBuffer(), app1ExifData,
- stream->bufferSize - sizeof(CameraBlob), (*planesLock).planes[0].data);
+ framebuffer->getHardwareBuffer(), app1ExifData, outBufferSize, outBuffer);
if (!compressedSize.has_value()) {
ALOGE("%s: Failed to compress JPEG image", __func__);
return cameraStatus(Status::INTERNAL_ERROR);
}
+ // Add the transport header at the end of the JPEG output buffer.
+ //
+ // jpegBlobId must start at byte[buffer_size - sizeof(CameraBlob)],
+ // where the buffer_size is the size of gralloc buffer.
+ //
+ // See
+ // hardware/interfaces/camera/device/aidl/android/hardware/camera/device/CameraBlobId.aidl
+ // for the full explanation of the following code.
CameraBlob cameraBlob{
.blobId = CameraBlobId::JPEG,
.blobSizeBytes = static_cast<int32_t>(compressedSize.value())};
- memcpy(reinterpret_cast<uint8_t*>((*planesLock).planes[0].data) +
- (stream->bufferSize - sizeof(cameraBlob)),
- &cameraBlob, sizeof(cameraBlob));
+ // Copy the cameraBlob to the end of the JPEG buffer.
+ uint8_t* jpegStreamEndAddress =
+ reinterpret_cast<uint8_t*>((*planesLock).planes[0].data) +
+ (stream->bufferSize - sizeof(cameraBlob));
+ memcpy(jpegStreamEndAddress, &cameraBlob, sizeof(cameraBlob));
ALOGV("%s: Successfully compressed JPEG image, resulting size %zu B",
__func__, compressedSize.value());
diff --git a/services/camera/virtualcamera/util/EglDisplayContext.cc b/services/camera/virtualcamera/util/EglDisplayContext.cc
index 166ac75..54307b4 100644
--- a/services/camera/virtualcamera/util/EglDisplayContext.cc
+++ b/services/camera/virtualcamera/util/EglDisplayContext.cc
@@ -54,7 +54,9 @@
EGLint numConfigs = 0;
EGLint configAttribs[] = {
EGL_SURFACE_TYPE,
- nativeWindow == nullptr ? EGL_PBUFFER_BIT : EGL_WINDOW_BIT,
+ nativeWindow == nullptr
+ ? EGL_PBUFFER_BIT // Render into individual AHardwareBuffer
+ : EGL_WINDOW_BIT, // Render into Surface (ANativeWindow)
EGL_RENDERABLE_TYPE, EGL_OPENGL_ES2_BIT, EGL_RED_SIZE, 8, EGL_GREEN_SIZE,
8, EGL_BLUE_SIZE, 8,
// no alpha
@@ -83,6 +85,9 @@
}
}
+ // EGL is a big state machine. Now that we have a configuration ready, we set
+ // this state machine to that configuration (we make it the "current"
+ // configuration).
if (!makeCurrent()) {
ALOGE(
"Failed to set newly initialized EGLContext and EGLDisplay connection "
diff --git a/services/camera/virtualcamera/util/EglProgram.cc b/services/camera/virtualcamera/util/EglProgram.cc
index 9c97118..47b8583 100644
--- a/services/camera/virtualcamera/util/EglProgram.cc
+++ b/services/camera/virtualcamera/util/EglProgram.cc
@@ -96,6 +96,7 @@
fragColor = texture(uTexture, vTextureCoord);
})";
+// Shader to render a RGBA texture into a YUV buffer.
constexpr char kExternalRgbaTextureFragmentShader[] = R"(#version 300 es
#extension GL_OES_EGL_image_external_essl3 : require
#extension GL_EXT_YUV_target : require